
Современные четырехногие роботы обычно состоят из корпуса и четырех конечностей, каждая из которых заканчивается круглой «ступней» с плоской подошвой. Это позволяет роботу успешно передвигаться по ровной поверхности и даже забираться вверх по лестнице.
Хотя внешне такие роботы напоминают четвероногих животных, они лишены инстинктивной способности последних поддерживать равновесие своего тела с помощью хвоста и гибкого позвоночника. Пока пола касаются три конечности, робот не падает, но стоит их количеству уменьшиться, риск потери баланса резко возрастает. Поэтому передвижение робота по пересеченной местности весьма проблематично.
Ученые из Института робототехники Университета Карнеги Меллон (США) , установив на спину четырехногого робота reaction wheel actuator (RWA) — реактивный маховик, приводимый в действие двигателем. Этот механизм широко используется в аэрокосмической отрасли для контроля за положением спутников в пространстве, не давая им переворачиваться — когда маховик вращается в одну сторону, спутник вращается в противоположную.
RWA совершил чудо — теперь робот может сохранять равновесие вне зависимости от положения своего тела, ног и того, сколько из них касаются поверхности. Например, ученые провели серию успешных экспериментов, в ходе которых в полуметре над полом робота переворачивали вверх ногами и отпускали, а он, как падающая кошка, успевал перевернуться в воздухе и приземлиться на все четыре «лапы».
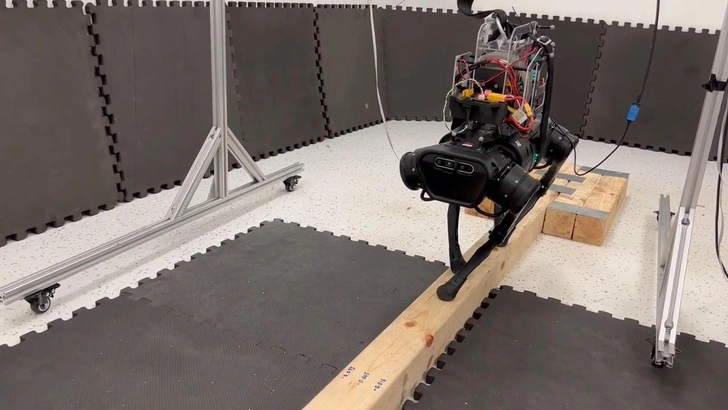
Но самым удивительным оказался эксперимент, в ходе которого робот, не теряя равновесия, осторожно идет по бревну шириной шесть сантиметров. До сих пор такого результата еще никому не удавалось добиться. Ученые планируют продолжить эксперименты, чтобы четырехногие роботы в ближайшем будущем вошли в нашу жизнь, и их можно было широко использовать в различных областях.