- Источник:
- ():
Как бы долго мы не ехали по прямой, а поворачивать рано или поздно придется. Способностью произвольно менять траекторию движения автомобиль выгодно отличается от, скажем, паровоза, но это умение требует от него наличия системы рулевого управления. Привычная «баранка» в руках водителя давно стала неотъемлемой частью машины, и мало кто задумывается, как далеко шагнула техническая мысль в этой области.
Первые поворотные устройства появились на гужевом транспорте. Даже самая примитивная деревенская телега имеет шкворневой узел, на котором поворачивается передняя ось. Ось (то есть, в автомобильных терминах, передний мост) крутится целиком, на центральном шкворне, что обеспечивает простоту и дешевизну конструкции. При условии «силового агрегата» в одну лошадиную силу, вынесенного далеко за пределы базы, и с учетом соответствующих скоростей, такое техническое решение справлялось с поставленными задачами в течение столетий. Однако уже на первых автомобилях стало ясно, что поворачивать весь мост очень неудобно. Передние колеса лучше поворачивать каждое на своем месте.
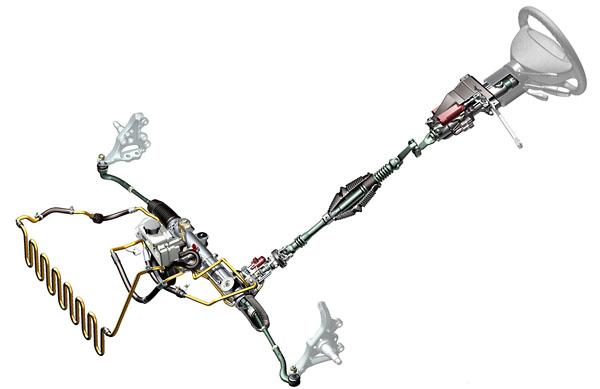
И тут же обнаружилась новая трудность: для обеспечения правильной траектории поворота, правое и левое передние колеса должны поворачиваться на разный угол, иначе возникает неизбежное боковое скольжение одного из них. Правильный поворот всего автомобиля обеспечивается специальной конструкцией, при помощи которой каждое из направляющих колес поворачивается на такой угол, что продолжения осей всех колес автомобиля должны пересекаться в одной точке — в центре поворота. Вот такая физика движения.
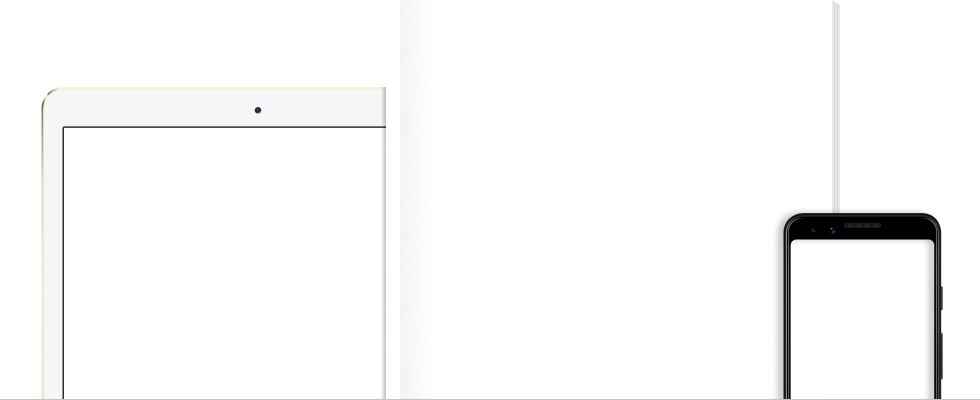
Однако первой, и долгое время преобладающей конструкцией поворотного механизма была рулевая трапеция, хорошо знакомая владельцам отечественных «Жигулей» . Вращательное движение руля преобразуется здесь посредством рулевого редуктора с в линейное движение системы рулевых тяг, которые и были долгое время проклятием автомехаников, поскольку требовали регулярной трудоемкой замены или переборки. Тяжелую жизнь тружеников ключа и кувалды несколько облегчило появление рулевой рейки, в которой, как-никак, было всего два рулевых кулака вместо шести… Впрочем, и рейка, и трапеция не решали главнейшую проблему автомобильного рулевого механизма — проблему разных передаточных чисел для разных колес.
Как известно любому, кто помнит по школе о , чем ниже передаточное число рулевого механизма, тем легче крутить руль. Но при этом возникают и свои минусы: чем легче крутить руль, тем больше оборотов придется сделать «от края до края». Мало кому понравится наворачивать «баранку» в несколько перехватов, чтобы совершить несложный маневр, да и времени на это не всегда хватает… Конечно, на специальных курсах для экстремалов вас научать крутить руль с удивительной скоростью, но это как-то не укладывается в общую техническую концепцию автомобилизма — делать управление все проще и проще. Сначала конструкторы пошли по экстенсивному пути — на грузовиках, где усилие поворота колес весьма значительно, ставили огромные «штурвалы», чтобы обеспечить водителю хороший рычаг, а водителям легковушек предоставляли накачивать бицепсы в меру нагрузки на переднюю ось. Однако вскоре появились гидроусилители, которые позволили даже хрупкой барышне провернуть руль тяжелого грузовика, не вставляя в спицы лом.
- Источник:
- DaimlerChrysler
Казалось бы, проблема решена — передаточное число делаем как можно больше, чтобы руль не надо было перехватывать, а необходимую силу за нас приложит гидронасос усилителя, отобрав её у мотора. Однако и это отнюдь не панацея. Дело в том, что диапазон скоростей автомобиля весьма велик, и при разных ритмах движение нужно рулить очень по разному. Скажем, чтобы развернуться на узком пятачке парковки, нужно поворачивать колеса на максимальные углы, причем практически стоя на месте, а при движении на максимальной скорости по трассе требуется тонкое руление в пределах нескольких градусов. Поэтому , весьма полезный на «парковочных» скоростях, на «максималке» превращался чуть ли не во врага, не давая почувствовать водителю «обратную связь» с колесами. Если кому-то доводилось ездить на старых «американцах» с их мощными усилителями, то он наверняка припомнит странное ощущение «нереальности» руля — как в компьютерном симуляторе. Почувствовать положение колес руками практически невозможно. Тут уже не до тонких маневров, хоть бы прямо проехать…
Решали эту проблему двумя способами. Первый, достаточно простой, использовали на машинах без усилителя руля (такие, поверьте, выпускают не только на ВАЗе). Это с переменным передаточным числом — то есть, шаг её зубьев меняется от средины к краям, и весьма существенно. (Отечественный пример — рейка ВАЗ 2110.) То есть при малых углах поворота руля, которые в основном используются при движении на высоких скоростях, передаточное число механизма велико — руль «тяжелый», но точный, а чем дальше от средней точки, тем легче крутится баранка, позволяя без излишних усилий вывернуть колеса на парковке.
Второй вариант — гидроусилитель с переменным усилием. Здесь передаточное число остается неизменным, зато меняется степень усиления. Едем медленно, пробираясь между машин в паркинге — гидроусилитель старается вовсю, делая руль почти невесомым. Чем выше скорость — тем меньше помощь, а на скоростях, близких к максимальным, усиление сходит на нет, давая водителю почувствовать связь с колесами.
Развитие рулевых систем шло по схеме, типичной для любых узлов управления автомобилем: механика-гидравлика-электрика. По мере своего развития, современный автомобиль пропитывается электроникой, как губка водой. Электроусилители руля сразу вывели системы управления на новый виток развития: мало того, что электроусилитель не забирает мощность двигателя непрерывно, как гидронасос, он ещё и позволяет менять параметры усиления в широких пределах, не громоздя сложную систему перепускных клапанов. Казалось бы, что ещё надо? А вот что — совмещение всех преимуществ предыдущих этапов развития в единый узел, и чтобы без их недостатков.

- Источник:
- Fiat Automobiles SpA
Недостаток рейки с переменным шагом — изменение передаточного числа связано не со скоростью, а с углом поворота колес. Это более-менее работает в штатных режимах движения, но если потребуется интенсивное руление на высокой скорости? Например, чтобы вывести машину из заноса? Вот тут уже потребуются навыки скоростного руления с множественными перехватами руля, а многие ли водители, положа руку на сердце, это умеют? Сделать же баранку, у которой «от края до края» меньше двух с половиной оборотов, не получится. (Есть модель «Альфа-Ромео», где руль делает лишь 2,2 оборота, но здесь ради сохранения горячего темперамента машины пожертвовали возможностью «просто ехать».)
Недостаток гидро- и электроусилителей с переменным усилием — передаточное число неизменно, меняется лишь усилие на руле. А значит, мы имеем либо слишком интенсивное руление при малых углах поворота, либо слишком резкие изменения углов в крайних положениях. То есть, в случаях той же борьбы с заносом, угадать точный угол поворота баранки становится почти невозможным.
Понятно, что идеальным решением было бы привязать оба параметра — и легкость вращения и передаточное число не к углам поворота колес, а непосредственно к скорости машины. Благо, померить её несложно даже для каждого отдельного колеса — антиблокировочные системы это давно умеют. Оставался нерешенным лишь вопрос исполнительного механизма — как, собственно, менять это самое передаточное число? Не поставишь же между рулем и колесами коробку передач? Однако, как известно, постановка задачи уже в себе содержит посылку к решению. И конце концов на свет появились системы VGRS и Active Steering.
Принцип работы обеих почти одинаков — чем быстрее вы едете, тем более плавным становится рулевое управление. По мере снижения скорости руль становится все более чутким. Система подбирает оптимальное передаточное число рулевого механизма под конкретную скорость автомобиля. Например, при очень низкой скорости, передаточное число будет минимальным, а руль будет легко крутиться во время парковки, на крутых поворотах и разворотах, а при энергичном движении по трассе — наоборот. Однако конструктивно системы несколько отличаются, а главное — их предлагают разные производители. Active Steering — детище баварских механиков и им комплектуются некоторые модели BMW, а VGRS — продукт японских технологий и устанавливается преимущественно на Lexus.
- Источник:
- Toyota Motor Europe S.A./N.V.
— дополнение к традиционному рулевому управлению. Между рулевым валом и рейкой встроен планетарный редуктор, водило которого перемещается электродвигателем. Соответственно, передаточное число всего привода меняется от 1:10 до 1:20. До 60 км/ч действует «быстрая» передача, потом она плавно «замедляется» и к 160 км/ч достигает максимального значения — несколько большего, чем у стандартного автомобиля. Так появилась возможность сократить число оборотов руля до 1,8. Почему непременно меньше двух? А чтобы исключить перехваты рулевого колеса — увы, далеко не все умеют делать это грамотно и безопасно.
Если узел системы Active Steering по размеру и компоновке похож на обычный электроусилитель, то японцы изобрели нечто более замысловатое. VGRS (), компактнее раз в пять — электромеханический усилитель расположен непосредственно в рулевой рейке, а в разрезе вала установлен некий «волновой редуктор». Принцип его действия не так прост, как у немцев — на эллиптическую центральную «шайбу» с начинкой из планетарного механизма надет гибкий зубчатый венец, а на него, в свою очередь, насажены два зубчатых колеса. При вращении внутреннего венца внешние части крутятся друг относительно друга. «Двусторонняя» шестерня соединена с рулевым валом, а сердцевина «шайбы» с валом электродвигателя. Чем больше обороты электромотора, тем быстрее вращается вторая внешняя «половинка», передающая усилие на рейку. Называется этот механизм «зубчатая двухволновая передача». Её внутренняя часть называется генератором волн деформации (волнообразователем), а относительное вращение внешних колец обусловлено разным числом зубьев: на одном зубчатом колесе зубьев столько же, сколько и на венце волнообразователя, а на втором — на два (по количеству волн) больше. Таким образом, за один полный оборот генератора волн гибкое колесо смещается относительно жесткого на два зуба в противоположном направлении. Таким образом система VGRS изменяет передаточное отношение рулевого управления — на парковке руль совершает от упора до упора 2,5 оборота, а с ростом скорости этот показатель растет до 3,6 оборота.
Споры о приоритетах между немцами и японцам — кто раньше придумал, — все ещё не окончены, однако идея, очевидно, носилась в воздухе. Тем более, что и BMW и Toyota воспользовались чужими разработками: Active Steering производит немецкая фирма «Цанрадфабрик» (ZF), а волновую передачу изобрел ещё в 1955 году американский инженер Уолтон Массер (, 1909–1998). Являются ли оба этих решения окончательными? Безусловно нет.

- Источник:
- BMW AG
Следующий шаг очевиден — полностью электронная система управления без механических связей. В конце концов, от механической связи управляющих и исполнительных устройств в авиации, например, отказались давно и успешно — и самолеты, притом, падают куда реже, чем бьются машины. Возможно даже, что руль и педали в автомобиле и вовсе исчезнут, поскольку самый логичный способ управления — нечто вроде джойстика. Экспериментальные концепты с таким управлением уже появляются «в железе», но на этом пути ещё немало трудностей. И главные проблемы лежат не в технической, а в бюрократической и психологической плоскостях. Сейчас машину без механической связи между рулем и колесами просто не сертифицируют — но это полбеды. Гораздо сложнее будет убедить в безопасности компьютерной системы управления водителя, у которого хоть раз заглючил Windows…
Читайте также в журнале «Вокруг Света»:
- Сотни поворотов
- Шоу настоящих любителей авто
- Приключения «джипа»