Лунный модуль «Афина» (Athena) американской компании Intuitive Machines потерпел крушение во время прилунения 6 марта 2025 года сразу по нескольким причинам. Подробности об итогах расследования аварии, которая помешала аппарату выполнить обширную научную программу миссии IM-2, сообщил гендиректор Intuitive Machines Стив Альтемус.
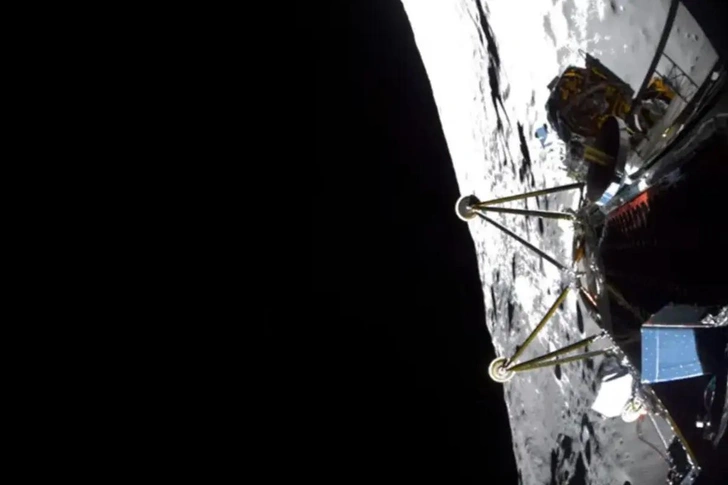

Модуль «Афина» во время прилунения
- Источник:
NASA TV
Напомним, запущенный к Луне в конце февраля аппарат «Афина» был разработан при поддержке NASA по программе CLPS (Commercial Lunar Payload Services), позволяющей ведомству доставлять на поверхность Луны научные инструменты на борту частных аппаратов для всестороннего изучения спутника, пока идет подготовка будущих высадок астронавтов. Он стал вторым лунным модулем Intuitive Machines. Первым был «Одиссей» (Odysseus), также созданный на базе платформы Nova-C, который запустили в феврале 2024 года в рамках миссии IM-1. Тогда жесткая посадка с последующим падением на бок на склоне помешала «Одиссею» выполнить значительную часть своей программы.
Проделанная инженерами компании работа над ошибками оказалась недостаточной: прилунение «Афины» прошло по схожему сценарию, не помогло даже имя модуля, выбранное в честь древнегреческой богини мудрости Афины. Спустя сутки после посадки «Афины» в компании объявили, что модуль прилунился в 250 метрах от расчетной точки на столовой горе Монс Мутон, расположенной в окрестностях Южного полюса Луны.
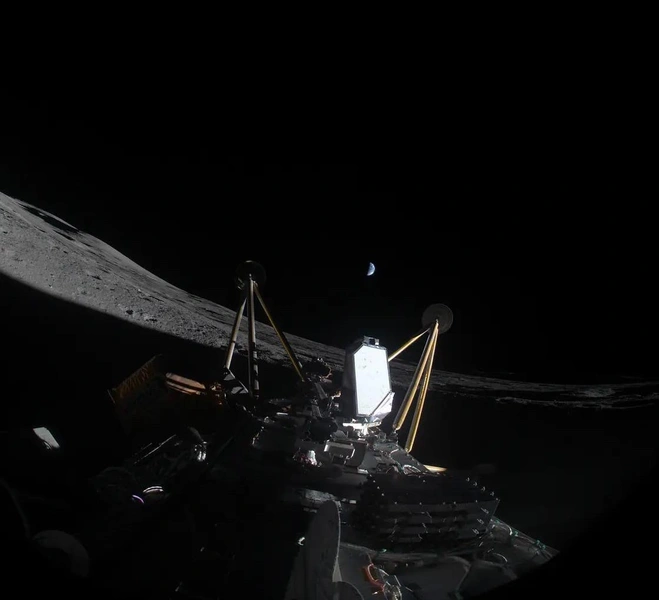
На фото, сделанном камерой модуля «Афина» после прилунения, видны посадочные опоры, на которых он должен был твердо стоять на поверхности спутника
- Источник:
Intuitive Machines
При этом аппарат не только опрокинулся на бок, но и оказался на затененном дне небольшого кратера. Вскоре после посадки аккумуляторы модуля разрядились, а солнечные батареи оказались бесполезны. В связи с этим миссия «Афины» была признана оконченной.
Почему не смог прилуниться модуль «Афина»
Как рассказал Альтемус, модуль потерпел неудачу из-за стечения трех обстоятельств. Во-первых, на финальном этапе снижения возникли проблемы с лазерным высотомером: сигналы с него передавались с помехами и искажениями. Во-вторых, система поиска подходящего места для посадки оказалась не готова к недостаточному освещению поверхности Луны в окрестностях Южного полюса спутника.
«Топография Южного полюса, низкое расположение Солнца над горизонтом, создававшее длинные тени, и слабый свет снизили точность работы нашей посадочной системы», — отметил глава компании.
Наконец, третьей причиной крушения «Афины» стал тот факт, что оптическая система навигации опиралась на снимки района посадки, сделанные орбитальным аппаратом NASA Lunar Reconnaissance Orbiter (LRO) с высоты 100 километров. Однако с меньшей высоты и в условиях низкой освещенности лунные кратеры выглядели не так, как на снимках LRO, что помешало соотнести их с картой.
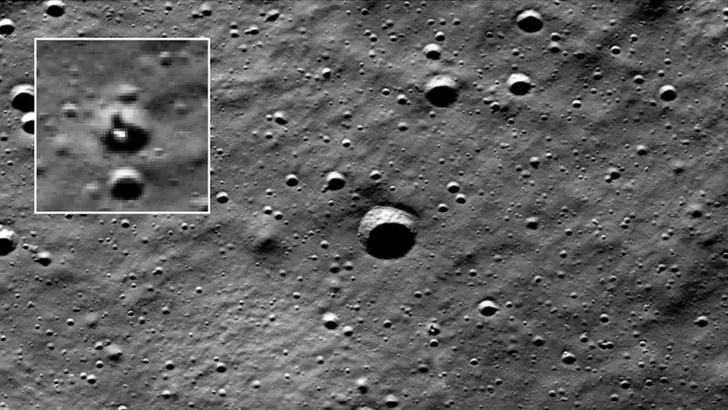
Снимок модуля «Афина», сделанный в марте 2025 года орбитальным аппаратом NASA Lunar Reconnaissance Orbiter
- Источник:
NASA/GSFC/Arizona State University
Сейчас в Intuitive Machines готовят третий лунный модуль, который планируется запустить в 2026 году. Альтемус пообещал, что инженеры компании учтут весь накопленный опыт миссий IM-1 и IM-2, чтобы новый аппарат не постигла участь «Одиссея» и «Афины».
Программа миссии IM-2 на Луне
Научная программа миссии IM-2 после посадки была рассчитана примерно на 10 дней — до наступления ночи в районе прилунения «Афины», который рассматривается в числе возможных мест высадки американских астронавтов в рамках миссии «Артемида-3», запланированной сейчас на 2027 год.
Для выполнения основной задачи на модуле были установлены буровая установка TRIDENT (The Regolith and Ice Drill for Exploring New Terrain — «Ледово-реголитный бур для исследования новой поверхности»), а также масс-спектрометр MSolo. С их помощью модуль должен был собрать образцы грунта с разной глубины и исследовать их на предмет содержания водяного льда. Этот комплекс приборов, созданный в NASA, получил название PRIME-1 (Polar Resources Ice Mining Experiment 1 — «Первый эксперимент по добыче полярного льда»).
Анимация работы научного комплекса PRIME-1 (NASA Langley Research Center / YouTube)
Также на борту «Афины» находились четырехколесный лунный ровер MAPP (Mobile Autonomous Prospecting Platform — «Мобильная автономная разведывательная платформа») компании Lunar Outpost, которому предстояло обследовать окрестности места посадки. Во время своего небольшого путешествия луноход должен был делать снимки и картографировать поверхность Луны, а также собирать и исследовать образцы грунта. Примечательно, что в это время по самому роверу MAPP должен был ползать робот AstroAnt, разработанный в Массачусетском технологическом институте (MIT). Этому «питомцу» размером со спичечный коробок предстояло проводить бесконтактные измерения температуры на верхней поверхности MAPP.
Наконец, «Афина» доставила на Луну крохотный 500-граммовый ровер Yaoki японской компании Dymon и прыжковый модуль Micro Nova Hopper. Последний должен был совершить несколько перелетов и обследовать расположенный поблизости кратер глубиной 20 метров. На его постоянно затененном дне могут находиться запасы водяного льда, необходимого для получения на Луне собственно воды, а также кислорода и водорода в случае создания на спутнике временной или постоянной базы.
Предполагалось, что ровер MAPP и модуль Micro Nova будут поддерживать связь с «Афиной» через систему LSCS (Lunar Surface Communication System — «Система связи на лунной поверхности»), созданную финской компанией Nokia. Это первая в своем роде коммуникационная система для Луны, использующая стандарт сотовой связи 4G вместо обычной радиочастоты. Она должна обеспечить быстрый обмен данными между аппаратами, включая прямую трансляцию видео в высоком разрешении.